ecuApi.h File Reference
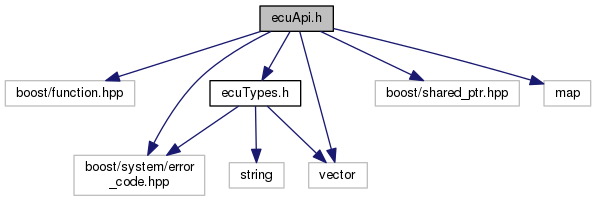
#include <boost/function.hpp>#include <boost/system/error_code.hpp>#include <boost/shared_ptr.hpp>#include <vector>#include <map>#include "ecuTypes.h"
Include dependency graph for ecuApi.h:
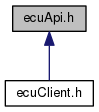
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Ecu |
| Allows to interact with a platform manager. More... | |
Namespaces | |
| dpyEcu | |
| Deepsy ECU namespace that includes the different enums, structs or method signatures that should be used. | |
Typedefs | |
| typedef boost::function< void(boost::system::error_code error_code)> | result_handler_function |
| Prototype of the handler function for obtaining a result. More... | |
| typedef boost::function< void(const bool &available)> | service_availability_handler |
| Prototype of the handler function used to monitor service availability. More... | |
| typedef boost::function< void(boost::system::error_code &ec, std::vector< dpyEcu::Parameter > params)> | parameters_handler_function |
| Handler for vehicle information. This type of function is called when the status callback is done. More... | |
| typedef boost::function< void(boost::system::error_code &ec, std::vector< std::string > EPIDs)> | epids_handler_function |
| Handler for vehicle available parameters. This type of function is called when the status callback is done. More... | |
| typedef boost::function< void(boost::system::error_code &ec, uint16_t id)> | confirmation_alarm_handler_function |
| Handler for status function callback. This type of function is called when the status callback is done. More... | |
| typedef boost::function< void(boost::system::error_code &ec, std::vector< dpyEcu::Alarm > alarms)> | alarms_handler_function |
| Handler for status function callback. This type of function is called when the status callback is done. More... | |
| typedef boost::function< void(boost::system::error_code &ec, dpyEcu::Protocol protocols)> | protocols_handler_function |
| Handler for protocols function callback. This type of function is called when the get protocols callback is done. More... | |
| typedef boost::function< void(boost::system::error_code &ec, dpyEcu::CANBusConfiguration config)> | can_config_handler_function |
| Handler for can config function callback. This type of function is called when the get can config callback is done. More... | |
| typedef boost::function< void(boost::system::error_code &ec, std::pair< dpyEcu::Alarm, dpyEcu::Parameter > alarm_event)> | alarm_event_handler_function |
| Handler for alarm event function callback. This type of function is called when the ecuAlarmEvent_S callback is done. More... | |
| typedef boost::function< void(boost::system::error_code &ec, dpyEcu::CANBusFrame frame)> | can_bus_message_handler_function |
| Handler for CAN bus message function callback. This type of function is called when a CAN bus frame is received. More... | |